Dynamic Programming (DP) plays an important role in traditional approaches of solving reinforcement learning with known dynamics. This post focuses on a more classical view of the basic reinforcment learning solution, mostly the tabular case.
We take an overview of the dynamic programming problem, followed by the solution of DP problems, namely, policy search, policy iteration and value iteration, along with the basic process of policy evaluation and policy improvement, to faciliate understanding, both theroy and code examples are presented.
1. Dynamic Programming Overview
The term dynamic programming (DP) refers to a collection of algorithms that can be used to compute optimal policies given a perfect model of the environment as a Markov decision process (MDP). Classical DP algorithms are of limited utility in reinforcement learning both because of their assumption of a perfect model and because of their great computational expense.
Dynamic Programming or (DP) is a method for solving complex problems by breaking them down into sub problems, solve the sub problems, and combine solutions to the sub problems to solve the overall problem.
DP is a very general solution method for problems which have two properties, the first is “optimal substructure” where the principle of optimality applies (discussed later). It tells us that we can solve some overall problem by breaking it down into two or more pieces, solve for each of the pieces, and the optimal solution to the pieces tells us how to get the optimal solution to the overall problem.
E.g. if your problem is to get from some point in space to the nearest wall, you will try to figure out the shortest path to the wall. DP tells us that the shortest path to the wall is the shortest path to a midpoint between you and the wall combined with the shortest path from that midpoint to the wall.
The second property is “overlapping sub problems”, which means that the sub problems which occur once, will occur again and again. We broke down the problem of getting to the wall into first getting to the midpoint, and then getting to the wall. That will help us solve the sub problem of how to get from another point to the wall. Solutions can be cached and reused.
Markov Decision Processes satisfy both mentioned properties. Bellman equation gives us recursive decomposition (the first property). Bellman equation tells us how to break down the optimal value function into two pieces, the optimal behavior for one step followed by the optimal behavior after that step.
What gives us the overlapping sub problems property in MDPs is the value function. It’s like a cache of the good information we figured out about the MDP.
2. Solving DP Problems
Three methods are commonly used to solve the DP problems with known dynamics/models, including policy search, policy iteration (characterized by the policy evaluation intertwining with the policy improvement) and value iteration. As illustrated in the following figure: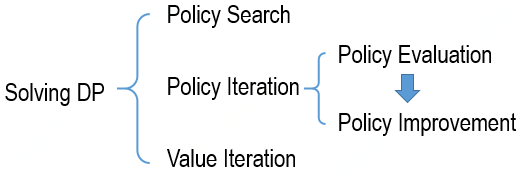 As most of the solutions are based on policy evaluation and policy improvement, I will introduce them first regardless of the order in the figure.
As most of the solutions are based on policy evaluation and policy improvement, I will introduce them first regardless of the order in the figure.
2.1 Policy Evaluation
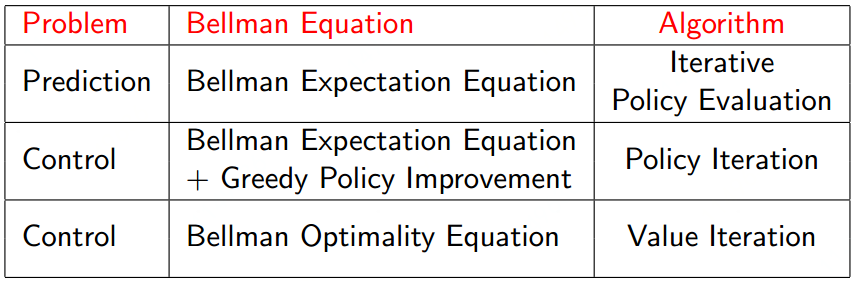
In policy evaluation, we’re given an MDP and a policy  . We try to evaluate the given policy. We can evaluate the given policy through iterative application of Bellman expectation equation, and later use the Bellman optimality equation to do control.
. We try to evaluate the given policy. We can evaluate the given policy through iterative application of Bellman expectation equation, and later use the Bellman optimality equation to do control.
How to compute the state-value function  for an arbitrary policy . This is called policy evaluation in the DP literature, or prediction problem.
for an arbitrary policy . This is called policy evaluation in the DP literature, or prediction problem.
![\[\begin{array}{l}{v_{\rm{\pi }}}\left( s \right) \buildrel\textstyle.\over= {\mathbb{E}_{\rm{\pi }}}\left[ {{G_t}\left| {{S_t} = s} \right.} \right]\\\;\;\;\;\;\;\;\;{\kern 1pt} = {\mathbb{E}_{\rm{\pi }}}\left[ {{R_{t + 1}} + \gamma {G_{t + 1}}\left| {{S_t} = s} \right.} \right]\\\;\;\;\;\;\;\;\;{\kern 1pt} = {\mathbb{E}_{\rm{\pi }}}\left[ {{R_{t + 1}} + \gamma {v_{\rm{\pi }}}\left( {{S_{t + 1}}} \right)\left| {{S_t} = s} \right.} \right]\\\;\;\;\;\;\;\;\;{\kern 1pt} = \sum\limits_a {{\rm{\pi }}\left( {a\left| s \right.} \right)} \sum\limits_{s',r} {p\left( {s',r\left| {s,a} \right.} \right)} \left[ {r + \gamma {v_{\rm{\pi }}}\left( {s'} \right)} \right]\end{array}\]](http://www.liaoyong.net/wp-content/ql-cache/quicklatex.com-80ac93cc061addac32525cfc4c71f1e1_l3.png "Rendered by QuickLaTeX.com")
 simultaneous linear equations with unknowns (the
simultaneous linear equations with unknowns (the  ). The analytical solution may cost much computation. An iterative method is most suitable. Consider a sequence of approximate value functions
). The analytical solution may cost much computation. An iterative method is most suitable. Consider a sequence of approximate value functions  , each mapping
, each mapping  to
to  (the real numbers). The initial approximation,
(the real numbers). The initial approximation,  , is chosen arbitrarily (except that the terminal state, if any, must be given value 0), and each successive approximation is obtained by using the Bellman equation for
, is chosen arbitrarily (except that the terminal state, if any, must be given value 0), and each successive approximation is obtained by using the Bellman equation for  as an update rule:
as an update rule: ![\[\begin{array}{l}{v_{k{\rm{ + 1}}}}\left( s \right) \buildrel\textstyle.\over= {\mathbb{E}_{\rm{\pi }}}\left[ {{R_{t + 1}} + \gamma {v_{\rm{\pi }}}\left( {{S_{t + 1}}} \right)\left| {{S_t} = s} \right.} \right]\\{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \;\;\;\;\;\;\;\;{\kern 1pt} = \sum\limits_a {{\rm{\pi }}\left( {a\left| s \right.} \right)} \sum\limits_{s',r} {p\left( {s',r\left| {s,a} \right.} \right)} \left[ {r + \gamma {v_k}\left( {s'} \right)} \right]\end{array}\]](http://www.liaoyong.net/wp-content/ql-cache/quicklatex.com-35e8de15ef9d0f889806878e620a6a8c_l3.png "Rendered by QuickLaTeX.com")
 .
.Expected update: To produce each successive approximation,
 from
from  , iterative policy evaluation applies the same operation to each state
, iterative policy evaluation applies the same operation to each state  : it replaces the old value of with a new value obtained from the old values of the successor states of , and the expected immediate rewards, along all the one-step transitions possible under the policy being evaluated. Each iteration of iterative policy evaluation updates the value of every state once to produce the new approximate value function . All the updates done in DP algorithms are called expected updates because they are based on an expectation over all possible next states rather than on a sample next state.
: it replaces the old value of with a new value obtained from the old values of the successor states of , and the expected immediate rewards, along all the one-step transitions possible under the policy being evaluated. Each iteration of iterative policy evaluation updates the value of every state once to produce the new approximate value function . All the updates done in DP algorithms are called expected updates because they are based on an expectation over all possible next states rather than on a sample next state.There are two versions of policy evaluation, as below:
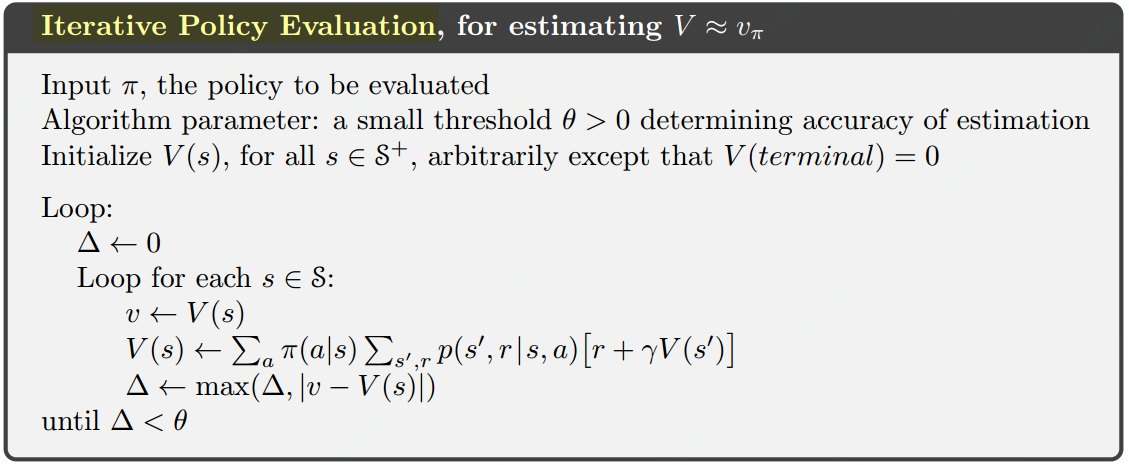 One array in-place version:
One array in-place version: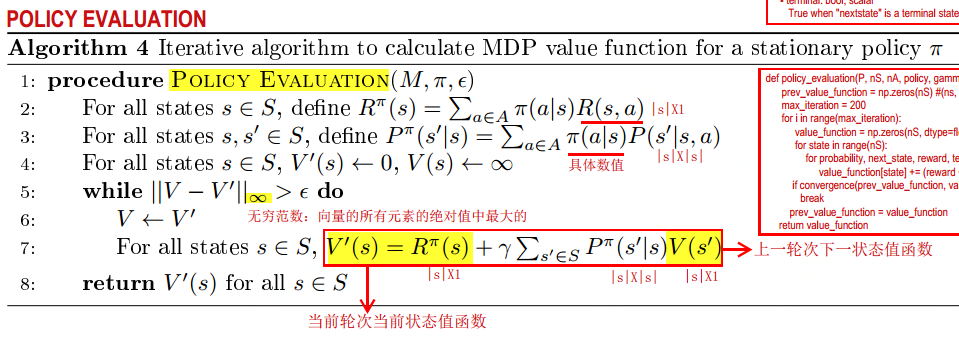 Corresponding Bellman backup diagram is as follow:
Corresponding Bellman backup diagram is as follow: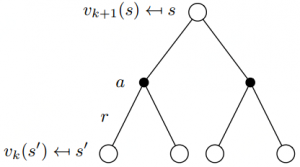 In formula, it would be:
In formula, it would be: ![\[\begin{array}{l}{v_{k{\rm{ + 1}}}}\left( s \right) = \sum\limits_{a \in \mathcal{A}} {{\rm{\pi }}\left( {a\left| s \right.} \right)\left( {\mathcal{R}_s^a + \gamma \sum\limits_{s' \in S} {\mathcal{P}_{ss'}^a{v_k}\left( {s'} \right)} } \right)} \\{{\bf{v}}^{k + 1}} = {{\bf{\mathcal{R}}}^{\bf{\pi }}} + \gamma {{\bf{\mathcal{P}}}^{\bf{\pi }}}{{\bf{v}}^k}\end{array}\]](http://www.liaoyong.net/wp-content/ql-cache/quicklatex.com-8c9dcf1f714078c2320c271e69e55380_l3.png "Rendered by QuickLaTeX.com")
 is the immediate reward correlating to state. Analytical solution can be calculated by the second formula.
is the immediate reward correlating to state. Analytical solution can be calculated by the second formula.Define the value function at next iteration by plugging in the previous iterations values of the leaves to effectively take the value functions from the last iteration BK, we plug in those values in the leaves, we back up those values to compute one single new value for the next iteration of the root. So we figure out the
 by looking one-step ahead from value function of last iteration.
by looking one-step ahead from value function of last iteration.The following is an example to illustrate the calculation process.
Calculation process is as follow:
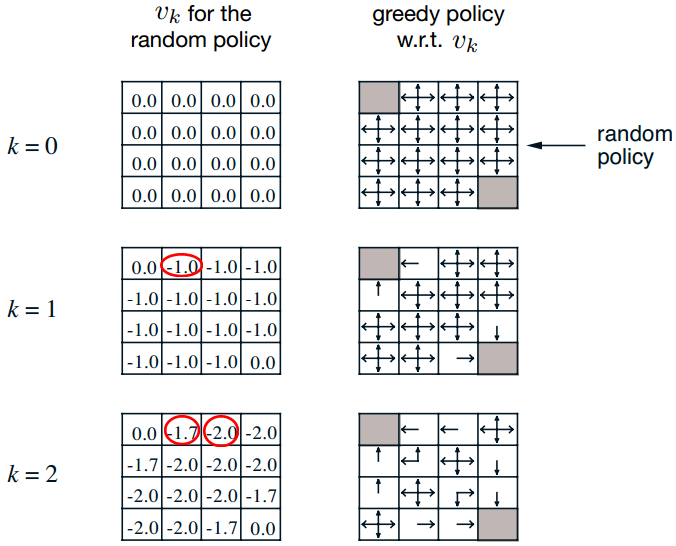
When k=1,
-1.0 = 0.25*(-1+0) + 0.25*(-1+0) + 0.25*(-1+0) + 0.25*(-1+0)
When k=2,
-1.7 = 0.25*(-1+0) + 0.25*(-1-1) + 0.25*(-1-1) + 0.25*(-1-1)
-2.0 = 0.25*(-1-1) + 0.25*(-1-1.0) + 0.25*(-1-1.0) + 0.25*(-1-1.0)
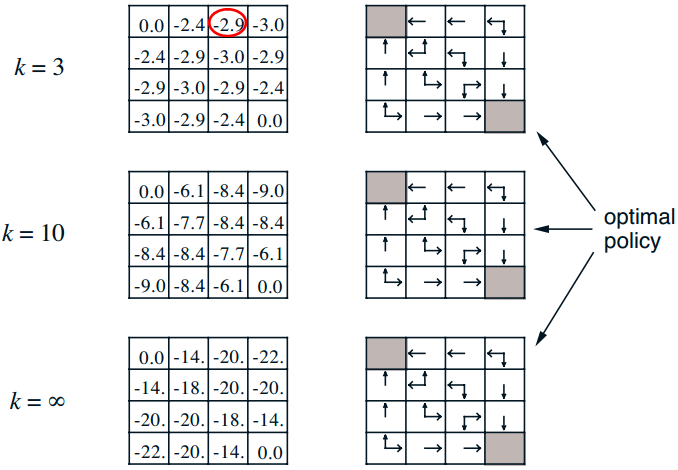
When k=3, A more detailed view drawn from other author is,
A more detailed view drawn from other author is,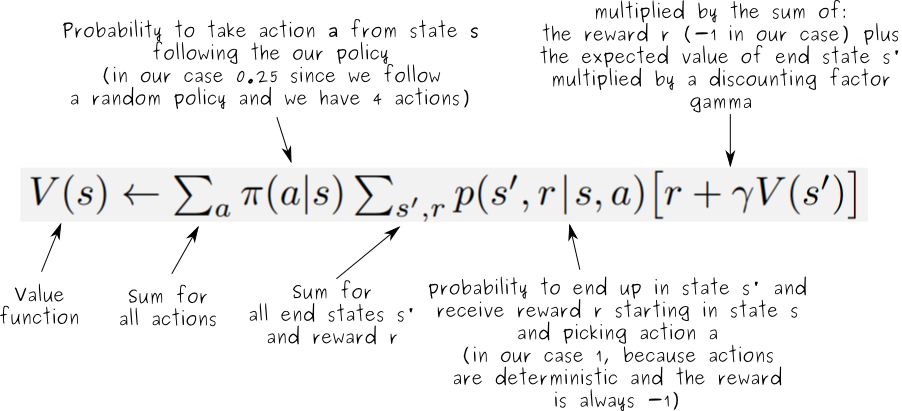
Code implementation for policy evaluation is as follow:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
def policy_evaluation(P, nS, nA, policy, gamma=0.9, tol=1e-3): """Evaluate the value function from a given policy. Parameters ---------- P, nS, nA, gamma: defined at beginning of file policy: np.array[nS] The policy to evaluate. Maps states to actions. tol: float Terminate policy evaluation when max |value_function(s) - prev_value_function(s)| < tol Returns ------- value_function: np.ndarray[nS] The value function of the given policy, where value_function[s] is the value of state s """ value_function = np.zeros(nS) while True: # new value function new_value_function = np.zeros(nS) # loop over state for s in range(nS): # To accumelate bellman expectation eqn with respect to actions for a in range(nA): # get transitions [(prob, next_state, reward, done)] = P[s][a] # apply bellman expectatoin eqn # Here assuming action_prob = 0.25, can also get from policy new_value_function[s] += 0.25 * prob * (reward + gamma * value_function[next_state]) delta = np.max(np.abs(new_value_function - value_function)) # the new value function value_function = new_value_function if delta < tol: break return value_function |
Take the Gridworld Example from “Nuts & Bolts of Reinforcement Learning: Model Based Planning using Dynamic Programming”
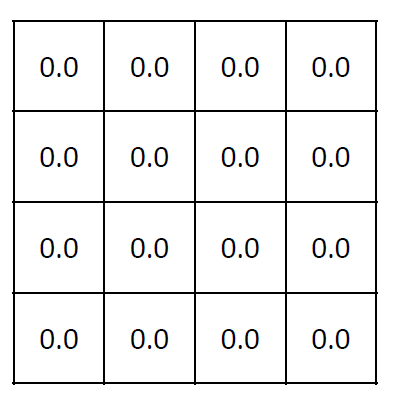
Similarly, for all non-terminal states,  .
.
For terminal states  and hence
and hence  for all
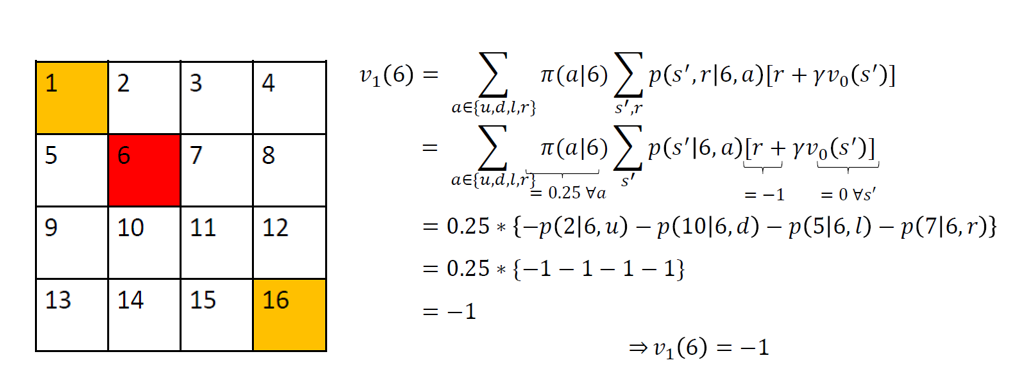
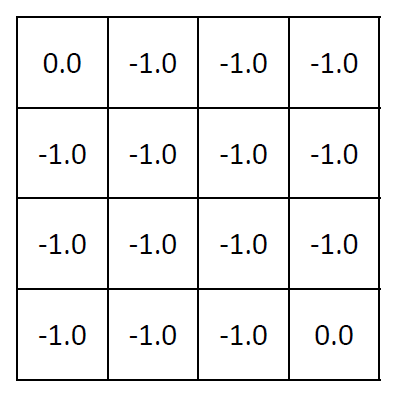
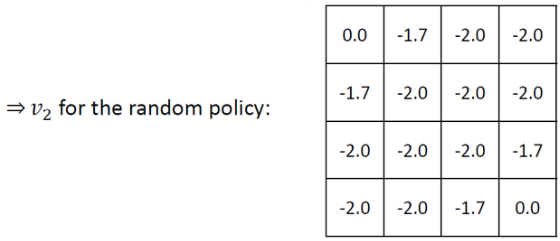
for all  . So v1 for the random policy is given by:
. So v1 for the random policy is given by:
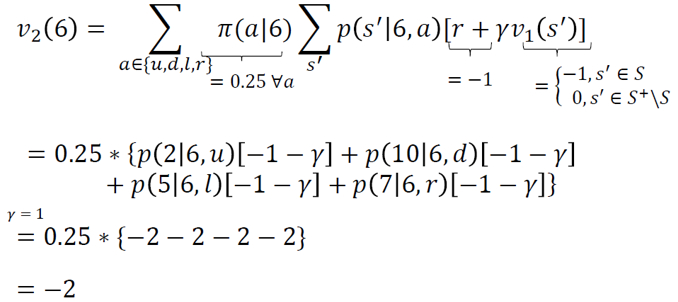
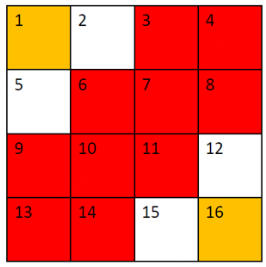
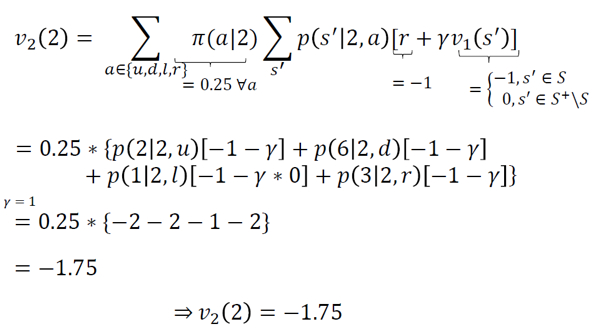
For all the remaining states, i.e., 2, 5, 12 and 15,  can be calculated as follows:
can be calculated as follows:
2.2 Policy Improvement
Policy Improvement: the process of making a new policy that improves on an original policy, by making it greedy with respect to the value function of the original policy.
![\[\begin{array}{l}{\rm{\pi '}}\left( s \right) \buildrel\textstyle.\over= \mathop {\arg \max }\limits_a {q_{\rm{\pi }}}\left( {s,a} \right)\\\;\;{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} = \mathop {\arg \max }\limits_a \mathbb{E}\left[ {{R_{t + 1}} + \gamma {v_{\rm{\pi }}}\left( {{S_{t + 1}}} \right)\left| {{S_t} = s,{A_t} = a} \right.} \right]\\\;\;{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} = \mathop {\mathop {\arg \max }\limits_a \sum\limits_{s',r} {p\left( {s',r\left| {s,a} \right.} \right)\left[ {r + \gamma {v_{\rm{\pi }}}\left( {s'} \right)} \right]} }\limits_a \end{array}\]](http://www.liaoyong.net/wp-content/ql-cache/quicklatex.com-2751ade2572d77aac862e1b08f0584c4_l3.png "Rendered by QuickLaTeX.com")
Corresponding algorithm is:
 Code implementation for policy improvement algorithm is as follow.
Code implementation for policy improvement algorithm is as follow.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
def policy_improvement(P, nS, nA, value_from_policy, policy, gamma=0.9): """Given the value function from policy improve the policy. Parameters ---------- P, nS, nA, gamma: defined at beginning of file value_from_policy: np.ndarray The value calculated from the policy policy: np.array The previous policy. Returns ------- new_policy: np.ndarray[nS] An array of integers. Each integer is the optimal action to take in that state according to the environment dynamics and the given value function. """ new_policy = np.zeros(nS, dtype='int') for s in range(nS): action_reward = [] for a in range(nA): prob, next_state, reward, done = P[s][a][0] action_reward.append(reward + gamma * prob * value_from_policy[next_state]) new_policy[s] = np.argmax(action_reward) return new_policy |
2.3 Policy Iteration
The reason for computing the value function for a policy is to help find better policies.![]() A finite MDP has only a finite number of policies, this process must converge to an optimal policy and optimal value function in a finite number of iterations. The policy iteration is shown in the following box.
A finite MDP has only a finite number of policies, this process must converge to an optimal policy and optimal value function in a finite number of iterations. The policy iteration is shown in the following box.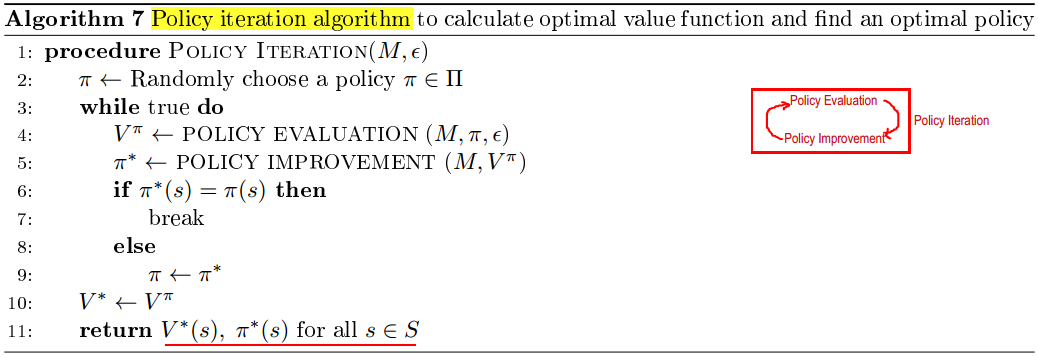
In combination with above policy evaluation and improvement process, code implementation for policy iteration algorithm is.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
def policy_iteration(P, nS, nA, gamma=0.9, tol=10e-3): """Runs policy iteration. You should call the policy_evaluation() and policy_improvement() methods to implement this method. Parameters ---------- P, nS, nA, gamma: defined at beginning of file tol: float tol parameter used in policy_evaluation() Returns: ---------- value_function: np.ndarray[nS] policy: np.ndarray[nS] """ # value_function = np.zeros(nS) policy = np.zeros(nS, dtype=int) while True: value_function = policy_evaluation(P, nS, nA, policy, gamma, tol) new_policy = policy_improvement(P, nS, nA, value_function, policy, gamma) policy_change = (new_policy != policy).sum() policy = new_policy if policy_change == 0: break return value_function, policy |
2.4 Value Iteration
One drawback to policy iteration is that each of its iterations involves policy evaluation, which may itself be a protracted iterative computation requiring multiple sweeps through the state set.
The policy evaluation step of policy iteration can be truncated in several ways without losing the convergence guarantees of policy iteration. One important special case is when policy evaluation is stopped after just one sweep (one update of each state). This algorithm is called value iteration.
Different views to see the value iteration:
(1) Value iteration is obtained simply by turning the Bellman optimality equation into an update rule.
(2) The value iteration update is identical to the policy evaluation update except that it requires the maximum to be taken over all actions.
Pseudocode for value iteration is as below: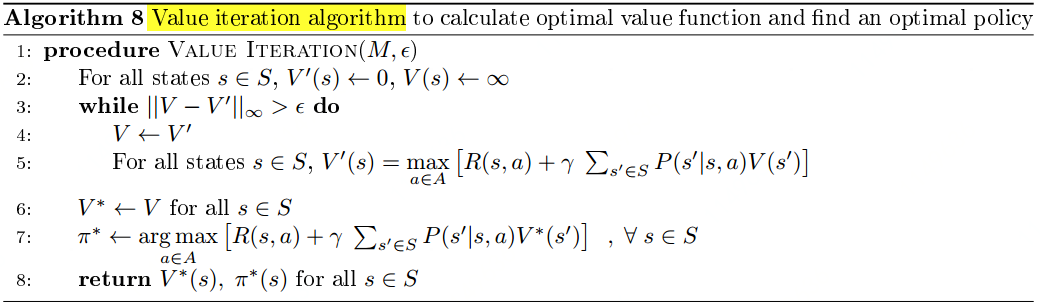 Code Implementaion:
Code Implementaion:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
def value_iteration(P, nS, nA, gamma=0.9, tol=1e-3): """ Learn value function and policy by using value iteration method for a given gamma and environment. Parameters: ---------- P, nS, nA, gamma: defined at beginning of file tol: float Terminate value iteration when max |value_function(s) - prev_value_function(s)| < tol Returns: ---------- value_function: np.ndarray[nS] policy: np.ndarray[nS] """ value_function = np.zeros(nS) policy = np.zeros(nS, dtype=int) while True: delta = 0. for s in range(nS): v_fn = value_function[s] action_value = [] for a in range(nA): [(prob, next_state, reward, done)] = P[s][a] action_value.append( prob * (reward + gamma * value_function[next_state])) value_function[s] = np.max(action_value) policy[s] = np.argmax(action_value) delta = np.maximum(delta, np.abs(v_fn - value_function[s])) if delta < tol: break return value_function, policy |
2.5 Policy Search
Pseudocode:
3. Examples
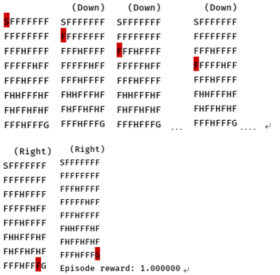
3.1 Frozen Lake
Problem Discription:
S: the starting position
F: the frozen lake where you can walk
H: holes, which have to be careful about to avoid
G: the goal
Code Implementation.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 |
### MDP Value Iteration and Policy Iteration import numpy as np import gym import time from lake_envs import * np.set_printoptions(precision=3) """ For policy_evaluation, policy_improvement, policy_iteration and value_iteration, the parameters P, nS, nA, gamma are defined as follows: P: nested dictionary From gym.core.Environment For each pair of states in [1, nS] and actions in [1, nA], P[state][action] is a tuple of the form (probability, nextstate, reward, terminal) where - probability: float the probability of transitioning from "state" to "nextstate" with "action" - nextstate: int denotes the state we transition to (in range [0, nS - 1]) - reward: int either 0 or 1, the reward for transitioning from "state" to "nextstate" with "action" - terminal: bool True when "nextstate" is a terminal state (hole or goal), False otherwise nS: int number of states in the environment nA: int number of actions in the environment gamma: float Discount factor. Number in range [0, 1) """ def policy_evaluation(P, nS, nA, policy, gamma=0.9, tol=1e-3): """Evaluate the value function from a given policy. Parameters ---------- P, nS, nA, gamma: defined at beginning of file policy: np.array[nS] The policy to evaluate. Maps states to actions. tol: float Terminate policy evaluation when max |value_function(s) - prev_value_function(s)| < tol Returns ------- value_function: np.ndarray[nS] The value function of the given policy, where value_function[s] is the value of state s """ value_function = np.zeros(nS) while True: # new value function new_value_function = np.zeros(nS) # loop over state for s in range(nS): # To accumelate bellman expectation eqn with respect to actions for a in range(nA): # get transitions [(prob, next_state, reward, done)] = P[s][a] # apply bellman expectatoin eqn # Here assuming action_prob = 0.25, can also get from policy new_value_function[s] += 0.25 * prob * (reward + gamma * value_function[next_state]) delta = np.max(np.abs(new_value_function - value_function)) # the new value function value_function = new_value_function if delta < tol: break return value_function def policy_improvement(P, nS, nA, value_from_policy, policy, gamma=0.9): """Given the value function from policy improve the policy. Parameters ---------- P, nS, nA, gamma: defined at beginning of file value_from_policy: np.ndarray The value calculated from the policy policy: np.array The previous policy. Returns ------- new_policy: np.ndarray[nS] An array of integers. Each integer is the optimal action to take in that state according to the environment dynamics and the given value function. """ new_policy = np.zeros(nS, dtype='int') for s in range(nS): action_reward = [] for a in range(nA): prob, next_state, reward, done = P[s][a][0] action_reward.append(reward + gamma * prob * value_from_policy[next_state]) new_policy[s] = np.argmax(action_reward) return new_policy def policy_iteration(P, nS, nA, gamma=0.9, tol=10e-3): """Runs policy iteration. You should call the policy_evaluation() and policy_improvement() methods to implement this method. Parameters ---------- P, nS, nA, gamma: defined at beginning of file tol: float tol parameter used in policy_evaluation() Returns: ---------- value_function: np.ndarray[nS] policy: np.ndarray[nS] """ # value_function = np.zeros(nS) policy = np.zeros(nS, dtype=int) while True: value_function = policy_evaluation(P, nS, nA, policy, gamma, tol) new_policy = policy_improvement(P, nS, nA, value_function, policy, gamma) policy_change = (new_policy != policy).sum() policy = new_policy if policy_change == 0: break return value_function, policy def value_iteration(P, nS, nA, gamma=0.9, tol=1e-3): """ Learn value function and policy by using value iteration method for a given gamma and environment. Parameters: ---------- P, nS, nA, gamma: defined at beginning of file tol: float Terminate value iteration when max |value_function(s) - prev_value_function(s)| < tol Returns: ---------- value_function: np.ndarray[nS] policy: np.ndarray[nS] """ value_function = np.zeros(nS) policy = np.zeros(nS, dtype=int) while True: delta = 0. for s in range(nS): v_fn = value_function[s] action_value = [] for a in range(nA): [(prob, next_state, reward, done)] = P[s][a] action_value.append( prob * (reward + gamma * value_function[next_state])) value_function[s] = np.max(action_value) policy[s] = np.argmax(action_value) delta = np.maximum(delta, np.abs(v_fn - value_function[s])) if delta < tol: break return value_function, policy def render_single(env, policy, max_steps=100): """ This function does not need to be modified Renders policy once on environment. Watch your agent play! Parameters ---------- env: gym.core.Environment Environment to play on. Must have nS, nA, and P as attributes. Policy: np.array of shape [env.nS] The action to take at a given state """ episode_reward = 0 ob = env.reset() for t in range(max_steps): env.render() time.sleep(0.25) a = policy[ob] ob, rew, done, _ = env.step(a) episode_reward += rew if done: break env.render() if not done: print("The agent didn't reach a terminal state in {} steps.".format(max_steps)) else: print("Episode reward: %f" % episode_reward) # Edit below to run policy and value iteration on different environments and # visualize the resulting policies in action! # You may change the parameters in the functions below if __name__ == "__main__": # comment/uncomment these lines to switch between deterministic/stochastic environments # env = gym.make("Deterministic-4x4-FrozenLake-v0") # env = gym.make("Stochastic-4x4-FrozenLake-v0") env = gym.make("Deterministic-8x8-FrozenLake-v0") print("\n" + "-"*25 + "\nBeginning Policy Iteration\n" + "-"*25) V_pi, p_pi = policy_iteration(env.P, env.nS, env.nA, gamma=0.9, tol=1e-3) render_single(env, p_pi, 100) print("\n" + "-"*25 + "\nBeginning Value Iteration\n" + "-"*25) V_vi, p_vi = value_iteration(env.P, env.nS, env.nA, gamma=0.9, tol=1e-3) render_single(env, p_vi, 100) |
The result for the above implementation is:
4. Summary
Both value-iteration and policy-iteration assume that the agent knows the MDP model of the world (i.e. the agent knows the state-transition and reward probability functions).Therefore, they can be used by the agent to (offline) plan its actions given knowledge about the environment before interacting with it.
In Value Iteration, we don’t make multiple steps because once the VF is optimal, then the policy converges (meaning it is also optimal). Whereas at policy iteration we do multiple steps in each iteration where every step gives us a different V(s) and the corresponding policy.